На питання "що таке імпеданс", я зазначив би, що імпеданс - це широке поняття фізики взагалі, електричний опір - лише один приклад.
Щоб зрозуміти, що це означає і як це працює, часто простіше розглянути механічний опір замість цього. Подумайте, намагаючись просунути важкий диван по підлозі.
Ви застосовуєте певну силу, і диван ковзає з певною швидкістю, залежно від того, наскільки сильно ви натискаєте, ваги дивана, типу поверхні підлоги, типу ніг, якими володіє диван, і так далі. У цій ситуації можна визначити механічний опір, який дає співвідношення між тим, наскільки сильно тиснеш, і тим, наскільки швидко йде диван.
Це насправді дуже схоже на електричний ланцюг постійного струму, де ви подаєте певну кількість напруги по ланцюгу, і струм протікає з певною відповідною швидкістю через нього.
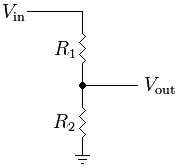
Що стосується як дивана, так і ланцюга, реакція на ваш вхід може бути простою і досить лінійною: резистор, що підкоряється закону Ома, де його електричний опір - це лише опір, а диван може мати стулки повзунка тертя, які це дозволяють рухатися зі швидкістю, пропорційною вашій силі. *
Схеми та механічні системи також можуть бути нелінійними. Якщо ваша схема складається із змінної напруги, розміщеної поперек резистора послідовно з діодом, струм буде майже нульовим, поки ви не перевищите напругу прямого діода, в який момент струм почне текти через резистор відповідно до Ома закон. Так само диван, що сидить на підлозі, зазвичай матиме певну ступінь статичного тертя: він не почне рухатися, поки ви не натиснете з певною кількістю початкової сили. Ні в механічній, ні в електричній системі немає єдиного лінійного опору, який можна визначити. Швидше, найкраще, що ви можете зробити, це окремо визначити імпеданси в різних умовах. (Реальний світ набагато більше подібний до цього.)
Навіть коли речі дуже чіткі та лінійні, важливо зазначити, що імпеданс просто описує коефіцієнт - це не описує межі системи, і це не «погано». Ви, безумовно, можете отримати стільки струму / швидкості, скільки хочете (в ідеальній системі), додавши більше напруги / натискаючи сильніше.
Механічні системи також можуть дати досить хороше відчуття змінного опору. Уявіть, що ви їдете на велосипеді. З кожним півциклом педалей ви натискаєте вліво, натискаєте праворуч. Ви також можете уявити педалювання лише однією ногою та затискачем для ніг, таким чином, щоб ви натискали та тягнули з кожним циклом вашої педалі. Це дуже схоже на подання змінного струму до ланцюга: ви натискаєте і тягнете по черзі циклічно з певною заданою частотою.
Якщо частота досить повільна - як, наприклад, коли ви зупиняєтесь на велосипеді, проблема натискання на педалі - це лише проблема "постійного струму", як натискання на диван. Коли ви пришвидшите, все може діяти інакше.
А тепер припустимо, що ви їдете на велосипеді з певною швидкістю, а ваш велосипед - це триступінчастий з низьким, середнім та високим коефіцієнтом передач. Середній відчуває себе природним, у привітній передачі важко застосувати достатню силу, щоб змінити значення, а при низькій передачі ви просто крутите педалі, не передаючи енергії на колеса. Це питання відповідності імпедансу , коли ви можете ефективно передати силу колесам лише тоді, коли вони надають певну фізичну опір вашій стопі - не надто, не занадто мало. Відповідне електричне явище також дуже поширене; вам потрібні лінії, що відповідають імпедансу, щоб ефективно передавати радіочастотну потужність від точки А до точки В, і кожного разу, коли ви з'єднаєте дві лінії передачі разом, на інтерфейсі буде певна втрата.
Опір, який надають педалі вашим ногам, пропорційний тому, наскільки сильно тиснеш, що найбільше стосується простого опору - особливо на низьких швидкостях. Навіть в ланцюгах змінного струму резистор поводиться як резистор (до певної точки).
Однак, на відміну від резистора, імпеданс велосипеда залежить від частоти. Припустимо, ви поставили велосипед у високій передачі, починаючи від зупинки. Починати це може бути дуже важко. Але, як тільки ви почнете працювати, імпеданс, який подають педалі, знижується, коли ви рухаєтесь швидше, і коли ви будете їхати дуже швидко, ви можете виявити, що педалі мають занадто малий опір, щоб поглинати силу з ваших ніг. Таким чином, насправді є частотний опір ( реактивний коефіцієнт), який починається з високого рівня і стає нижчим, коли ви переходите на більш високу частоту.
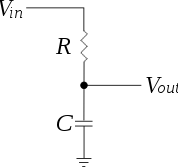
Це дуже схоже на поведінку конденсатора, і досить хорошою моделлю для механічного опору велосипеда був би резистор паралельно конденсатору.
На постійному струмі (нульова швидкість) ви просто бачите високий, постійний опір як свій імпеданс. Зі збільшенням частоти педалювання імпеданс конденсатора стає нижчим, ніж у резистора, і дозволяє струму текти таким чином.
Звичайно, є різні інші електричні компоненти та їх механічні аналогії **, але ця дискусія повинна дати вам деяку початкову інтуїцію щодо загальної концепції, щоб залишатися заземленою (каламбур), коли ви дізнаєтесь про математичні аспекти того, що часом може здатися як дуже абстрактний предмет.
* Слово до прискіпливого: Закон Ома ніколи не є точним для реального пристрою, а сили тертя в реальному світі ніколи не дають швидкості точно пропорційній силі. Однак "досить лінійно" легко. Я намагаюся тут бути всім освітнім та іншим. Поріжте мені якусь слабкість.
** Наприклад, індуктор - це щось на зразок пружинного валика на вашому колесі, що додає перетягування при досягненні більшої частоти)